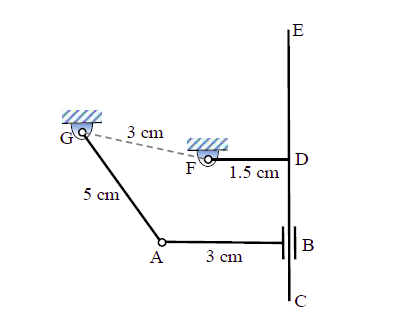
A planar four-bar linkage mechanism with $3$ revolute kinematic pairs and $1$ prismatic kinematic pair is shown in the figure, where $AB \perp CE$ and $FD \perp CE$. The $T$-shaped link $\text{CDEF}$ is constructed such that the slider $B$ can cross the point $D$, and $\text{CE}$ is sufficiently long. For the given lengths as shown, the mechanism is
- a Grashof chain with links $\text{AG, AB, and CDEF}$ completely rotatable about the ground link $\text{FG}$
- a non-Grashof chain with all oscillating links
- a Grashof chain with $\text{AB}$ completely rotatable about the ground link $\text{FG}$, and oscillatory links $\text{AG and CDEF}$
- on the border of Grashof and non-Grashof chains with uncertain configuration(s)